
Introduzione
Una definizione comunemente accettata di tecnologia viene dal sociologo americano Read Bain che scrisse: “La tecnologia include tutti gli strumenti, le macchine, gli attrezzi, le armi, gli apparecchi, le abitazioni, i vestiti, i dispositivi di comunicazione e di trasporto e le abilità con cui li produciamo e li usiamo“. Poiché gli automata sono macchine semplici, sono tecnologia per definizione. Lavorare con gli automata insegna ai bambini le abilità su come produrre tali macchine semplici. In questa sezione del Corso per Insegnanti AutoSTEM Online, puoi imparare i concetti chiave per la costruzione di automata.
Concetti chiave per la costruzione di automata
Collegamenti
Un collegamento è un elemento rigido con una cerniera ad ogni estremità per collegarlo ad altri elementi. I collegamenti sono usati per collegare diversi elementi insieme e per trasferire il movimento da un posto all’altro. Ci sono diversi tipi di collegamenti. Negli automata AutoSTEM, usiamo il meccanismo di movimento inverso, il meccanismo di movimento parallelo e il meccanismo del braccio a forbice.

Se un meccanismo di collegamento ha un punto di rotazione fisso nel mezzo, un’estremità si muove nella direzione opposta rispetto all’altra estremità. Questo è chiamato un meccanismo di movimento inverso.
Se due collegamenti hanno un punto di rotazione fisso ciascuno e sono collegati da un terzo collegamento come mostrato in figura, si muoveranno sempre parallelamente l’uno all’altro. Il movimento dell’asta destra ha la stessa direzione del movimento dell’asta sinistra. Questo è chiamato un collegamento di movimento parallelo.
Il meccanismo del braccio a forbice è una combinazione del movimento inverso e del collegamento a moto parallelo, ma non ha punti di rotazione fissi. Quando si muovono le estremità delle due aste da una parte contro l’altra, l’altra parte si allontana (il braccio si allunga) e anche le estremità dall’altra parte si muovono l’una contro l’altra.
Camma e driver a frizione
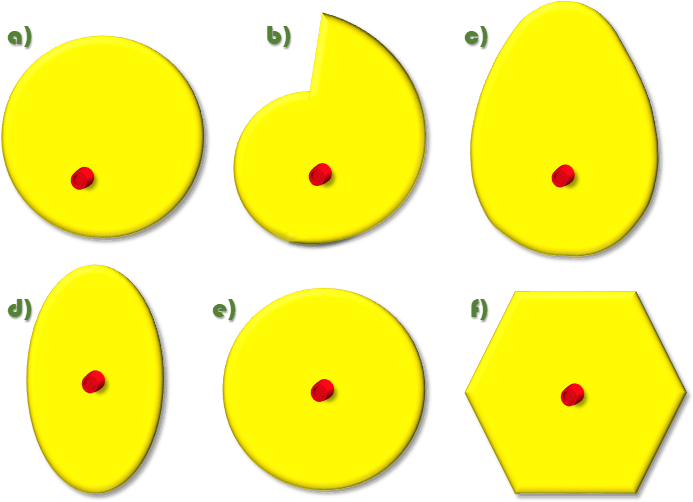
Una camma converte il moto rotatorio in moto alternato di un perno. Il moto alternativo va su e giù perché il perno deve essere spinto verso il basso sulla camma dal suo peso. La camma spinge il perno verso l’alto. Non c’è alcun collegamento tra la camma e il perno. Con una camma, possiamo creare tutti i tipi di movimenti disomogenei verso l’alto e verso il basso (ad esempio lentamente verso l’alto e velocemente verso il basso) usando camme di forme diverse. La forma della camma è chiamata profilo della camma. Negli automata AutoSTEM, usiamo solo camme eccentriche. Un driver di frizione converte il moto rotatorio con un asse orizzontale in un moto rotatorio con un asse verticale.
Possiamo combinare un driver di frizione con una camma eccentrica. Questo crea un movimento interessante: Il perno va su e giù mentre gira.
Nell’immagine qui sotto, vedrete diversi profili di camme.
Troverai altri contenuti sui principi meccanici nella sezione di fisica.