
4.2 ТЕХНОЛОГИЯ
Въведение
Общоприетото определение за технология идва от американския социолог Рид Бейн, който пише: „Технологията включва всички инструменти, машини, прибори, оръжия, инструменти, жилища, облекло, комуникационни и транспортни устройства и уменията, чрез които ги произвеждаме и използваме“. Тъй като автоматите са прости машини, те са технология по дефиниция. Работата с автоматите учи децата на умения как да произвеждат такива прости машини. В този раздел на AutoSTEM Online Teachers ’Course можете да научите за ключовите концепции за изграждане на автомати
Ключови концепции за изграждане на автомати
Връзки
Връзката е твърд елемент с шарнир на всеки край за свързване с други елементи. Връзките се използват за свързване на различни елементи заедно и за прехвърляне на движение от едно място на друго. Има няколко различни типа връзки. В автоматите AutoSTEM използваме връзката за обратно движение, връзката за паралелно движение и механизма на ножичното рамо.

Ако връзката има фиксирана точка на въртене в средата, единият край се движи в обратна посока от другия край. Това се нарича връзка с обратно движение.
Ако две връзки имат фиксирана точка на завъртане и са свързани с трета връзка, както е показано на фигурата, те винаги ще се движат успоредно една на друга. Движението на десния прът има същата посока като движението на левия прът. Това се нарича връзка с паралелно движение.
Механизмът на ножичното рамо е комбинация от обратното движение и връзката на паралелното движение, но няма фиксирани точки на въртене. Когато преместите краищата на двете пръчки от едната страна една срещу друга, другата страна се отдалечава (ръката се изпъва), а краищата от другата страна също се движат една срещу друга.
Зъбец и задвижващо колело
Зъбецът преобразува въртеливото движение в възвратно-постъпателно движение на последовател. Възвратно-постъпателното движение се издига нагоре и надолу, защото последователят трябва да бъде натиснат надолу върху гърбицата от неговата тежест. Зъбецът тласка последователя нагоре. Няма връзка между гърбицата и приспособлението. С гърбица можем да създаваме всякакви нехомогенни движения нагоре и надолу (например бавно нагоре и бързо надолу), като използваме гърбици с различни форми. Формата на гърбицата се нарича профил на гърбицата. В автоматите AutoSTEM използваме само ексцентрични гърбици.
Задвижващото колело преобразува въртеливото движение с хоризонтална ос във въртеливо движение с вертикална ос.Можем да комбинираме задвижващото колело с ексцентрична гърбица. Създава интересно движение: Последователят върви нагоре и надолу, докато се обръща.
На снимката по-долу ще видите различни профили на гърбици.
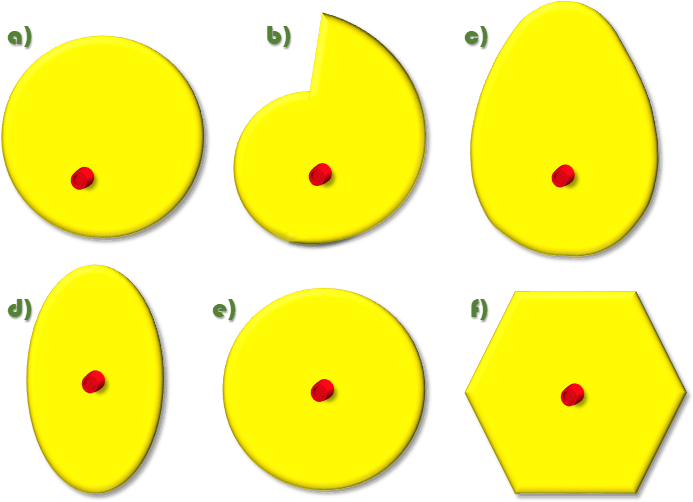
Ще намерите повече съдържание за механичните принципи в раздела по физика.