
Introduction
A commonly accepted definition of technology comes from the American sociologist Read Bain who wrote, ‘Technology includes all tools, machines, utensils, weapons, instruments, housing, clothing, communicating and transporting devices and the skills by which we produce and use them.’ Since automata are simple machines, they are technology by definition. Working with automata teaches children skills on how to produce such simple machines. In this section of the AutoSTEM Online Teachers’ Course, you can learn about the key concepts for automata construction.
Key concepts for automata construction
Linkages
A linkage is a rigid element with a hinge at each end to connect it to other elements. Linkages are used to link different elements together and to transfer motion from one place to another. There are several different types of linkages. In the AutoSTEM automata, we use the reverse motion linkage, the parallel motion linkage and the scissor arm mechanism.

If a linkage has a fixed pivot point in the middle, one end moves in the opposite direction than the other end. This is called a reverse motion linkage.
If two linkages have a fixed pivot point each and are linked by a third linkage as shown in the figure, they will always move parallel to each other. The motion of the right rod has the same direction as the motion of the left rod. This is called a parallel motion linkage.
The scissor arm mechanism is a combination of the reverse motion and the parallel motion linkage but has no fixed pivot points. When you move the ends of the two rods on one side against each other, the other side moves away (the arm stretches out) and the ends on the other side move against each other, too.
Cam and friction driver
A cam converts rotary motion into reciprocating motion of a follower. The reciprocating motion goes up and down because the follower has to be pushed down on the cam by its weight. The cam pushes the follower upwards. There is no linkage between the cam and the follower. With a cam, we can create all kinds of inhomogeneous up and down motions (e.g. slowly up and fast down) by using cams of different shapes. The shape of the cam is called the cam profile. In the AutoSTEM automata, we only use eccentric cams.
A friction driver converts rotary motion with a horizontal axis into rotary motion with a vertical axis.
We can combine a friction driver with an eccentric cam. It creates an interesting movement: The follower goes up and down while it turns around.
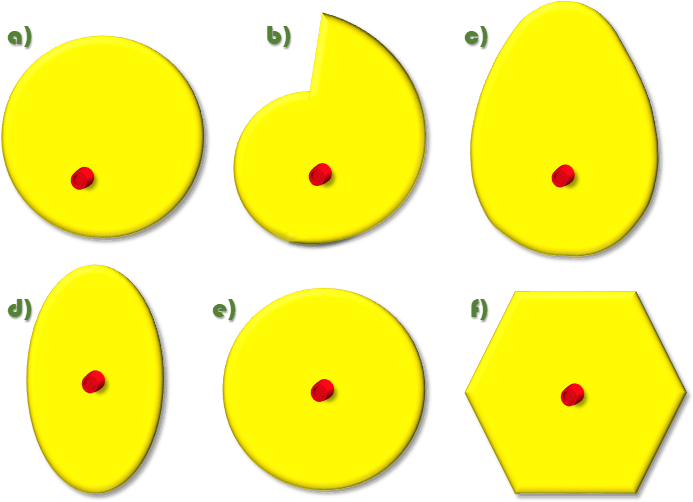
On the picture below, you see different cam profiles.
You will find more content about mechanical principles in the physics section.